Finds the least-cost path (LCP) from the start point (the point
used to create the LcpFinder) to another point, using a
Quadtree as a resistance surface.
# S4 method for Quadtree
find_lcp(
x,
start_point,
end_point,
use_orig_points = TRUE,
xlim = NULL,
ylim = NULL,
search_by_centroid = FALSE
)
# S4 method for LcpFinder
find_lcp(x, end_point, allow_same_cell_path = FALSE)Arguments
- x
- start_point
two-element numeric vector; the x and y coordinates of the starting point. Not used if
xis aLcpFindersince the start point is determined when theLcpFinderis created (usinglcp_finder()).- end_point
two-element numeric vector; the x and y coordinates of the destination point
- use_orig_points
boolean; if
TRUE(the default), the path is calculated betweenstart_pointandend_point. IfFALSE, the path is calculated between the centroids of the cells the points fall in.- xlim
two-element numeric vector (xmin, xmax); passed to
lcp_finder(); constrains the nodes included in the network to those whose x limits fall in the range specified inxlim. IfNULLthe x limits ofxare used- ylim
same as
xlim, but for y- search_by_centroid
boolean; passed to
lcp_finder(); determines which cells are considered to be "in" the box specified byxlimandylim. IfFALSE(the default) any cell that overlaps with the box is included. IfTRUE, a cell is only included if its centroid falls inside the box.- allow_same_cell_path
boolean; default is FALSE; if TRUE, allows paths to be found between two points that fall in the same cell. See 'Details' for more.
Value
Returns a five column matrix representing the LCP. It has the following columns:
x: x coordinate of this point (centroid of the cell)y: y coordinate of this point (centroid of the cell)cost_tot: the cumulative cost up to this pointdist_tot: the cumulative distance up to this point - note that this is not straight-line distance, but instead the distance along the pathcost_cell: the cost of the cell that contains this pointid: the ID of the cell that contains this point
If no path is possible between the two points, a zero-row matrix with the previously described columns is returned.
Details
See the vignette 'quadtree-lcp' for more details and examples (i.e. run
vignette("quadtree-lcp", package = "quadtree"))
Using find_lcp(<Quadtree>) rather than find_lcp(<LcpFinder>)
is simply a matter of convenience - when a Quadtree is passed
to find_lcp(), it automatically creates an LcpFinder
and then uses find_lcp(<LcpFinder>) to get the path between the two
points. This is convenient if you only want a single LCP. However, if you
want to find multiple LCPs from a single start point, it is better to first
create the LcpFinder object using lcp_finder()
and then use find_lcp(<LcpFinder>) for finding LCPs. This is because
an LcpFinder object saves state, so subsequent calls to
find_lcp(<LcpFinder>) will run faster.
By default, if the end point falls in the same cell as the start point, the
path will consist only of the point associated with the cell. When using
find_lcp with a LcpFinder, setting
allow_same_cell_path to TRUE allows for paths to be found
within a single cell. In this case, if the start and end points fall in the
same cell, the path will consist of two points - the point associated with
the cell and end_point. If using find_lcp with a
Quadtree, this will automatically be allowed if
use_orig_points is TRUE.
See also
lcp_finder() creates the LCP finder object used as
input to this function. find_lcps() calculates all LCPs
whose cost-distance is less than some value. summarize_lcps()
outputs a summary matrix of all LCPs that have been calculated so far.
Examples
####### NOTE #######
# see the "quadtree-lcp" vignette for more details and examples:
# vignette("quadtree-lcp", package = "quadtree")
####################
library(quadtree)
habitat <- terra::rast(system.file("extdata", "habitat.tif", package="quadtree"))
# create a quadtree
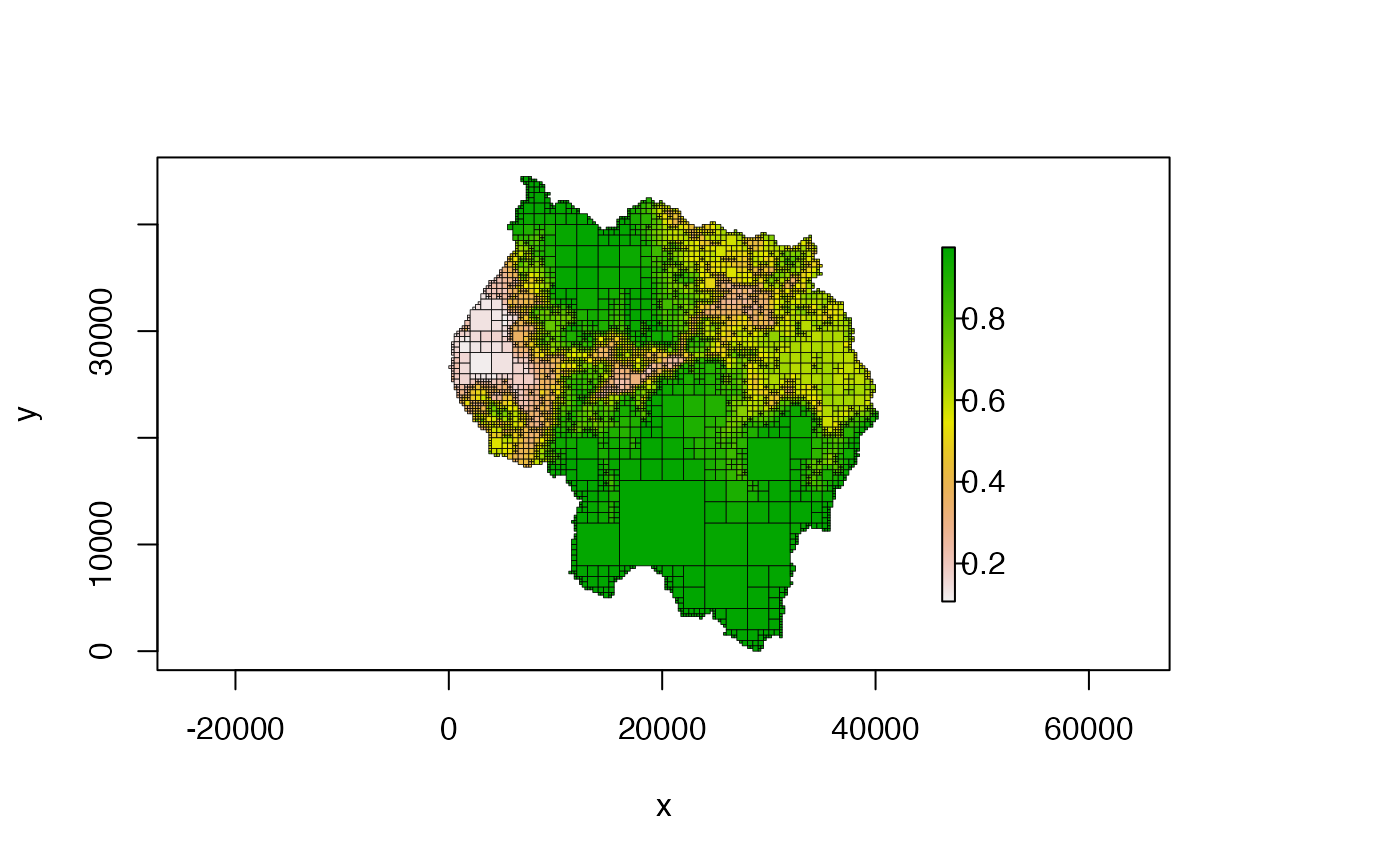
qt <- quadtree(habitat, split_threshold = .1, adj_type = "expand")
plot(qt, crop = TRUE, na_col = NULL, border_lwd = .4)
 # define our start and end points
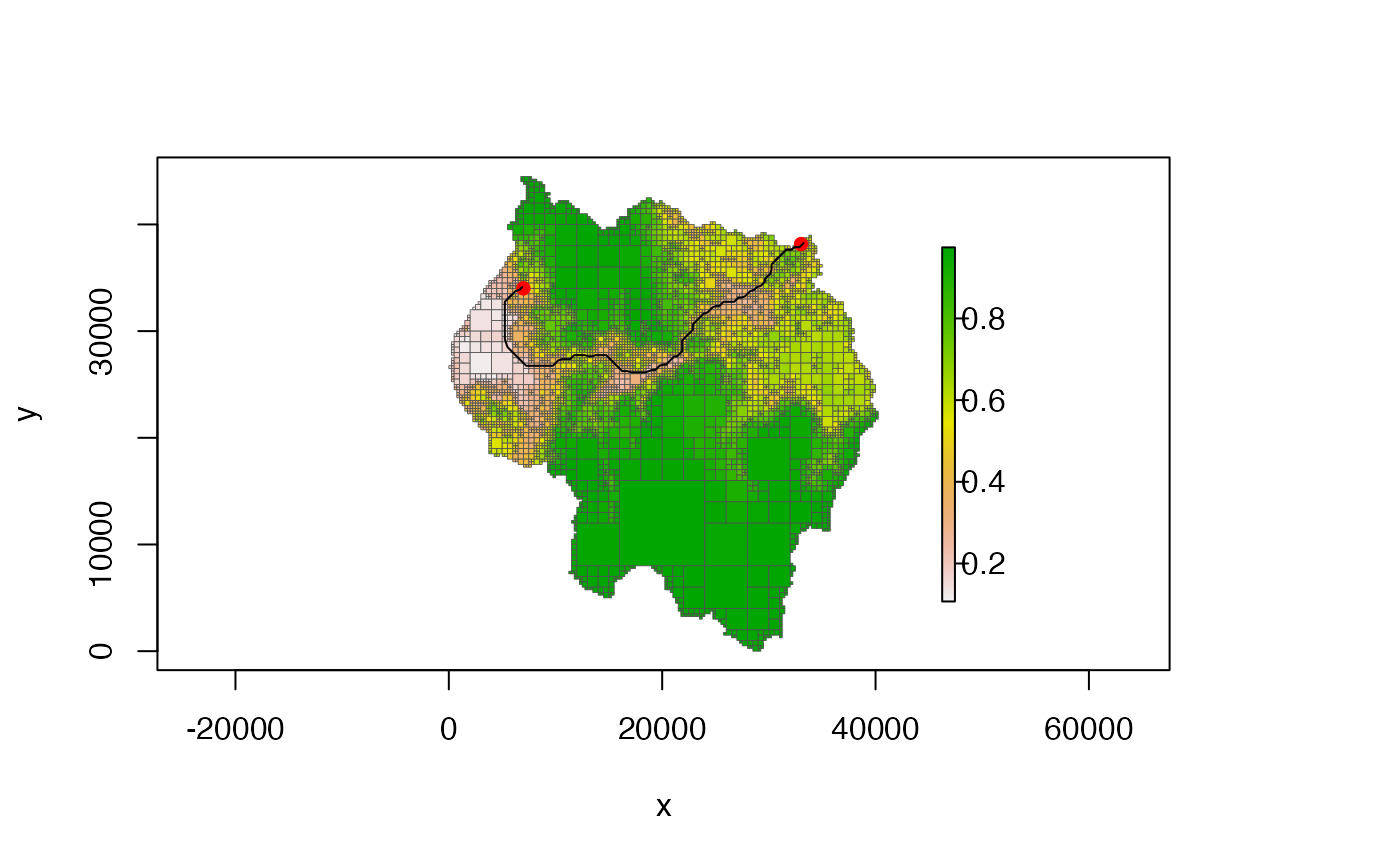
start_pt <- c(6989, 34007)
end_pt <- c(33015, 38162)
# create the LCP finder object and find the LCP
lcpf <- lcp_finder(qt, start_pt)
path <- find_lcp(lcpf, end_pt)
# plot the LCP
plot(qt, crop = TRUE, na_col = NULL, border_col = "gray30", border_lwd = .4)
points(rbind(start_pt, end_pt), pch = 16, col = "red")
lines(path[, 1:2], col = "black")
# define our start and end points
start_pt <- c(6989, 34007)
end_pt <- c(33015, 38162)
# create the LCP finder object and find the LCP
lcpf <- lcp_finder(qt, start_pt)
path <- find_lcp(lcpf, end_pt)
# plot the LCP
plot(qt, crop = TRUE, na_col = NULL, border_col = "gray30", border_lwd = .4)
points(rbind(start_pt, end_pt), pch = 16, col = "red")
lines(path[, 1:2], col = "black")
 # note that the above path can also be found as follows:
path <- find_lcp(qt, start_pt, end_pt)
# note that the above path can also be found as follows:
path <- find_lcp(qt, start_pt, end_pt)